Load sharing provides multiple advantages, but care must be taken in design
Load sharing is generally defined as the use of multiple prime movers, typically motors, to operate a common load. It can be found in a vast number of applications including but not limited to rock crushers, extruders and conveyors. Load sharing provides a multitude of advantages in a variety of applications.
A big benefit of load sharing is the ability to use a combination of smaller motors as opposed to one main large motor, for example two 300 hp motors versus one 600 hp motor. This is advantageous because of the greater availability of the smaller sized motors, which results in faster delivery times and more price competitiveness.
Most motor manufacturers stock motors up to 500 hp, so applications requiring larger sizes typically need specially built motors with longer lead times. In an emergency situation, this additional lead time could prove costly.
For manufacturers that choose to stock a spare motor to minimize downtime in case of motor failure, less space is needed to store a smaller motor. Larger motors may also require additional maintenance during storage such as turning the rotor to a different resting position on a regular basis to prevent a flat spot from forming on the motor bearings.
Load sharing not only confers advantages in terms of purchasing and maintenance, but also in terms of simpler design and reduced downtime.
Smaller motors spread risk
Another advantage of using smaller stock motors in a load sharing design – as opposed to one large motor – arises when configuring how and where the motors are mounted. It’s often easier to locate and design a mounting space for two smaller motors as opposed to one larger motor. Examples include multiple motors mounted to a common gearbox in an extruder, or the distribution of the motors throughout a conveyor system.
Depending on the design of the machine and the components used, it’s often possible to easily increase the motive force with a load sharing arrangement. This can be as simple as increasing the power capacity of one or more of the motors attached to a common gearbox. This can often be done without the need of a major retrofit, unlike when a single and much larger motor needs to be upsized.
Because load sharing uses multiple motors, it’s often possible to operate at a reduced capacity if one of the motors fails. In this situation, the remaining functional motors are used to power the system with only a slight reduction in motive force.
Contrast this with a single motor application where a motor failure results in downtime and a complete loss of productivity until the motor is repaired or replaced. Load sharing does have significant advantages, but care must be taken during design.
Best practices for design
Though load sharing offers substantial advantages, it can increase complexity because multiple motors are employed. The motors must be properly configured and coordinated so that the load is equally distributed, otherwise the motors can oppose or fight. Although maintenance of a smaller motor is generally less than that required of a larger motor, there are multiple motors to maintain instead of one.
When implementing a load sharing configuration with ac induction motors, there are several methods that can be used to operate and control the motors. The simplest and most inexpensive method is to power all the motors across the line.
Powering the motors across the line can be handled via a single large contactor with individual overload protection for each motor (Fig. 1), or with a contactor and overload protection for each motor (Fig. 2).
A single main contactor is the simplest arrangement because power can be applied or removed to all the motors at once with a single operation. But this arrangement requires that all motors run simultaneously, and so it doesn’t offer the flexibility of using only the motors available or needed to power the load. When starting motors across the line, a single contactor arrangement results in a high inrush current to the motors, causing a sudden stress to plant power system.
Using a contactor for each motor instead of a single contactor reduces the inrush current, but with either arrangement there is no ability to electronically vary the speed of the motors individually without employing complex mechanical systems.
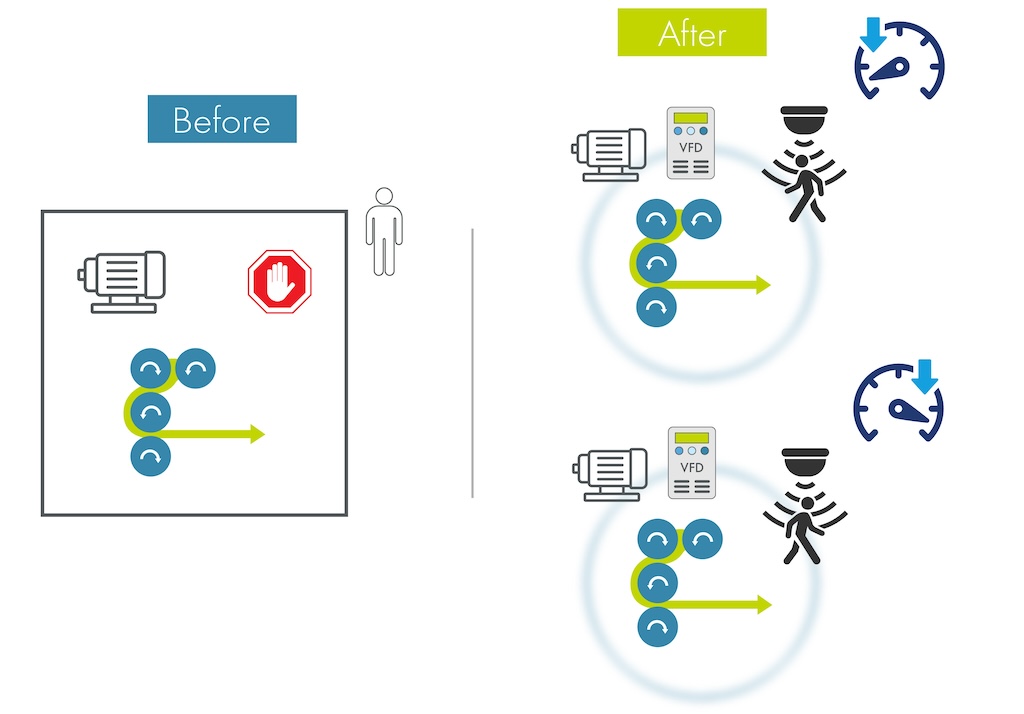
In applications where motor speed needs to be controlled, either for all motors simultaneously or for each motor individually, variable speed drives provide the best solution.
Meet the need for variable speed
Variable speed control allows motors to operate at the optimal point of maximum efficiency, and is often a requirement in certain applications. Adjustable speed motor drives such as inverters or a variable frequency drives are typically used to control motor speed. In addition to controlling motor speed, an adjustable speed drive can soft-start a motor through a controlled acceleration of the motor from zero to the commanded speed, reducing motor inrush current.
Similar to single speed load sharing arrangements, the system can be configured to control all the motors using one large variable speed drive (Fig. 3), or with individual drives for each motor (Fig. 4).
When using a single drive to power all the motors, the drive must be sized large enough to handle the total load of all the motors combined. Individual overloads should be used for each motor because most motor drives aren’t designed to protect individual motors when used in a multi-motor load sharing configuration.
When multiple motors are being controlled by a single drive, vector control isn’t recommended as it’s designed for control of a single motor. The drive should instead be operated in a Volts-per-Hertz (V/Hz) control mode, even thought this mode doesn’t provide tight speed regulation. With V/Hz control, output speed varies depending on the amount of load due to slip in the motors.
Using an individual adjustable motor speed drive for each motor as depicted in Figure 4 provides two major advantages over the single drive approach. First, the system can continue to share the load and operate if a single drive fails, albeit at reduced capacity. Second, each drive can be operated in its closed-loop vector control mode. Unlike V/Hz control, vector control provides tight regulation of speed regardless of load.
Load sharing with multiple motors provides many advantages over single motor systems, but care must be taken in design to ensure maximum performance. When tight speed control is required for the motors in a load sharing system, individual control of each motor via its own adjustable speed drive is recommended.
Edward Tom is an application engineer at Yaskawa Electric America Inc.
Sidebar:
Advantages of load sharing
Although load sharing adds to machine complexity, if best practices in design are observed, load sharing offers significant advantages when appropriately applied. These advantages include:
The system can continue to operate when one motor fails
Motive force can be more easily increased
Smaller motors have shorter lead times
Smaller motors are often priced more competitively
Smaller motors take up less storage space
Smaller motors require less maintenance when in storage.