When combining a motor and inverter, the application should tell you what type of motor fits best. Follow these guidelines.

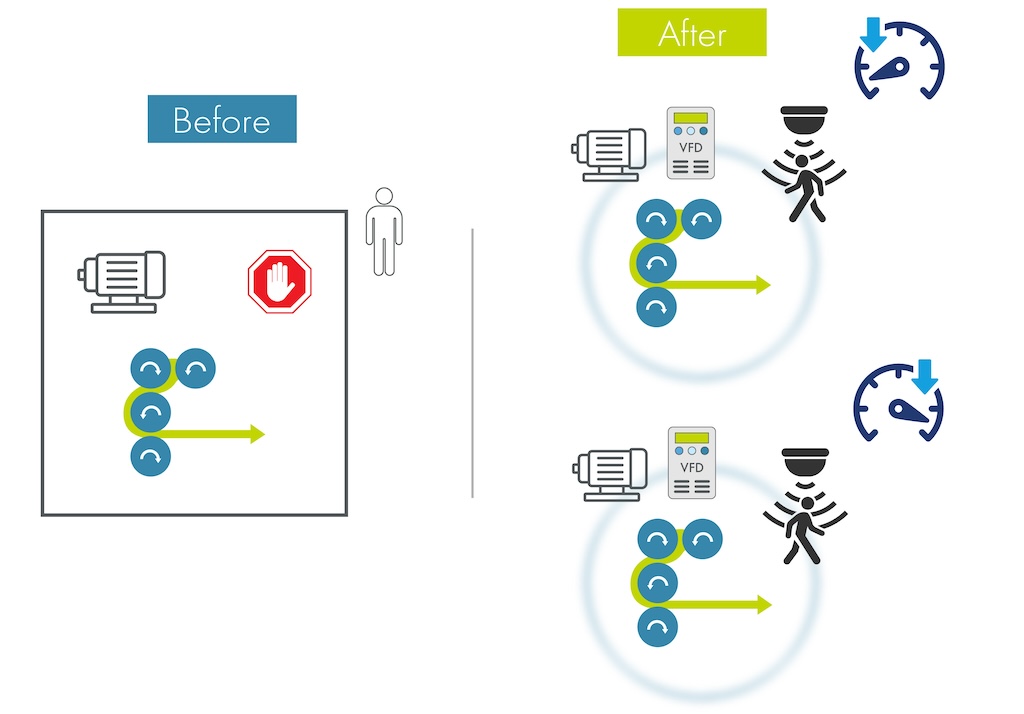
Today adjustable-speed drives (ASDs) are commonly used to regulate the flow of air and water from motor-driven fans and pumps. In doing so, old-style dampers and flow valves are eliminated and the motor’s speed regulates the flow. Adjusting the motor’s speed saves energy. Other ac motors and drives are used to replace old dc motor technology used on conveyors and extruders. To maximize the life of motors used in this manner, we need to understand the motor features needed to operate with a drive, so we do not specify designs that are more robust and expensive than are really required.
Why use an ASD?
An ac adjustable-speed drive changes the input voltage and frequency to the motor, which changes the motor’s speed. There are several types and loads, each with specific load characteristics that affect the motor. The most common type is a variable-torque load where the horsepower required varies by the cube of the speed change. This is called the affinity law. So on a centrifugal pump load (assuming pump efficiency remains constant), this chart illustrates what happens:
Since most equipment is sized for worst-case conditions, it never runs at full capacity. On a variable-torque load such as a pump, the usual running condition may be at 60% speed, which requires only 22% of the motor’s horsepower. The reduced wattage drops the operating cost significantly. A 100 hp motor operating continuously could cost $27,139 for annual operation at full speed. At 60% speed the operating cost would be reduced to $5,970, a $21,169 annual savings.
A second type of load has constant-torque characteristics. The torque requirement remains constant and does not change as speed is adjusted. Such applications are conveyors, extruders, mixers, and positive-displacement pumps. There is a lower energy saving as speed is adjusted on a constant-torque installation. Using a drive on a constant-torque application may save energy through increased productivity and be measured through benchmarking of widgets per kWh.
Selecting a motor
General-purpose integral horsepower NEMA-premium efficiency motors from most manufacturers can be used for all variable-torque and many constant-torque applications. These 3-phase low-voltage ac squirrel-cage induction motors (<600 volts) are built with an inverter-ready or inverter-capable insulation system and are generally NEMA Design A or B motors that can be started across the line or used with a bypass should the inverter fail. Enclosures for general-purpose motors are usually totally enclosed non-vented (TENV) or totally enclosed fan-cooled (TEFC) with a cooling fan on the motor shaft. Open drip-proof (ODP) motors have an open enclosure and circulate air through the motor for cooling. These motor enclosures work well on variable-torque loads because as the speed decreases, the amount of power the load requires also decreases—as does the amount of cooling the fan can supply. When we talk about the speed range for a motor with a variable-torque load, it is called variable-torque speed range (VTSR) and is usually quite wide.
General-purpose NEMA-premium efficiency TEFC motors can also be used for constant-torque loads, but their speed range may be limited. For example, a constant-torque speed range (CTSR) is expressed as 10:1, or the motor can operate from base speed to 1/10 of base speed (180–1,800 RPM). Generally lower-horsepower general-purpose motors can operate over a wider speed range (20:1) because of their lower temperature rise. Larger motors (100 hp and up) may be limited to 4:1 or 2:1 CTSR due to the effectiveness of TEFC cooling, which is reduced when operated at low speeds.
Small fractional-horsepower ac motors may be limited as to the operating voltage from an inverter. It is not uncommon for these motors to be limited to 230 Vac input from inverter power because it is difficult to machine insert phase paper in these motors. Consequently, they do not hold up well to high-voltage overshoots that are common in the output wave form of most drives.
Only applications requiring a motor to produce constant torque over a wide speed range require a true inverter-duty motor. Such a motor may have a standard premium-efficiency winding (for use with a bypass or line start) or be supplied with a special winding optimized for use with an inverter and may not be capable of starting across the line. In addition to TENV and TEFC enclosures, inverter-duty motors may also have a separately powered constant velocity fan to ensure cooling at low speeds and are totally enclosed blower-cooled (TEBC). These motors usually have a 1,000:1 CTSR and with a flux vector drive can provide full torque at zero speed. Families of vector-duty motors are similar to inverter-duty but usually provided with encoder feedback for more precise speed regulation than can be done with an open-loop vector control. Inverter-duty and vector-duty motors are made in conventional NEMA and IEC frames and may provide increased performance in a drop-in solution.
The style of an inverter-duty motor described above may look like a standard smooth steel band, cast iron, or aluminum finned NEMA or IEC motor, but another type exists that has a frame made of the exposed motor lamination. The motor will be longer, have lower rotor inertia for fast response, and be built in a smaller-diameter frame. These motors typically have higher power densities than the typical cast iron frame NEMA designs. Because of their power density and nonstandard foot mounting dimensions, these exposed-lamination motors are not a drop-in replacement for a conventional NEMA or IEC general-purpose motor.
In the end, the application will dictate the motor used based on a variable-torque load (pump or fan) or a constant-torque load (conveyor or extruder). If it is a variable-torque load, general-purpose NEMA-premium efficiency TEFC or ODP motors should be adequate for the application. If it is a constant-torque load, the speed range and amount of torque needed at low speed will dictate the motor. On many CTSR applications, a general-purpose TEFC motor may be adequate if it provides 4:1 to 10:1 speed range. On applications requiring rated torque at very low speeds (and to zero speed), use of an inverter-duty or vector-duty motor may be required.
Which energy-efficiency regulations apply?
General-purpose motors are required by law to have minimum efficiencies in the U.S., Canada, EU, and other locations. In the U.S. and Canada, most general-purpose motors in the 1–200 hp range are required to have a nominal premium efficiency no lower than NEMA MG 1-2011, table 12-12. Motors in the 201–500 hp range need to be energy efficient per table 12-11.
Appendix A to Subpart B of 10 CFR 431 issued by the U.S. Dept. of Energy states:
Motors with features or characteristics that do not meet the statutory definition of ‘electric motor’ are not covered, and therefore are not required to meet EPCA requirements. Examples include motors without feet and without provisions for feet, and variable-speed motors operated on a variable-frequency power supply. Similarly, multi-speed motors and variable-speed motors, such as inverter-duty motors, are not covered equipment, based on their intrinsic design for use at variable speeds. However, NEMA Design A or B motors that are single speed, meet all other criteria under the definitions in EPCA for covered equipment, and can be used with an inverter in variable-speed applications as an additional feature, are covered equipment under EPCA. In other words, being suitable for use on an inverter by itself does not exempt a motor from EPCA requirements.
What this means is that marking a NEMA Design A or B general-purpose motor as inverter-duty does not exempt it from U.S. DOE coverage. This U.S. DOE rule is similar to Canadian law. Only true special-purpose inverter-duty motors as discussed in NEMA MG 1-2011 Part 31 are exempt in the U.S. and Canada. In the EU, inverter-duty motors are exempt from their regulations as well. Generally speaking, such motors cannot be used as general-purpose motors operating from a standard sine wave line and easily line started. The windings are optimized for use with an inverter power supply.
How ac drives work
AC adjustable-speed drives came into the market in the 1970s as high-capacity power transistors became readily available. These drives are also known as inverters, variable-frequency drives (VFDs), or adjustable-speed drives (ASDs). The drive takes ac power, uses rectifiers to change it from ac to dc, stores the dc in a capacitor bank (like a battery), and then chops up the dc into a simulated sine wave form for each of the three phases. A basic inverter uses voltage and frequency changes to adjust the speed of the motor. The voltage and frequency ratios (V/Hz) can be adjusted to provide different characteristics from the motor, such as a specific starting torque, or provide for operation above the motor’s base speed. V/Hz-based drives work well with variable-torque loads such as pumps and fans. Some advanced drives carefully control the current to the motor with vector control or direct torque control and can operate the motor over a wider speed range while providing full-rated torque for constant-torque applications such as conveyors and extruders.
Since a motor becomes a generator when spun at speeds above its synchronous speed, an overhauling load on a hoist or conveyor can cause the motor to generate excess energy that is pushed into the drive. This energy has to be discharged through a braking resistor, or the drive protects itself with an over-voltage trip. Some drives are designed with an active front end, which is another set of transistors to rectify the input power that can also be used to synthesize a sine wave back to the input line as line regeneration.
As faster switching transistors were developed, voltage overshoots began to cause insulation failures on motors. Some spikes from 460 V inverters can reach 2,400 V. These high voltages can break down the motor’s insulation system (see sidebar below).
Additionally, the harmonics in a PWM (pulse-width modulation) wave form can lower the motor’s efficiency when compared to operation on a sine wave. Additional heating occurs in the motor, which may also lower the amount of torque provided at low speed.
For most applications, a general-purpose NEMA-premium motor is adequate for use with an inverter. These motors should work well with most centrifugal pump and fan loads that have variable-torque characteristics. For constant-torque loads that have wide speed ranges, general-purpose motors may work, but you should check with the motor manufacturer to determine if that motor can be operated over the specific speed range you need. For extreme constant-torque speed ranges, true inverter-duty motors should be specified. Such inverter-duty motors may have special windings that do not allow operation without an inverter, or they may have separately powered auxiliary cooling fans.
John Malinowski is the senior product manager of ac motors for Baldor Electric Co.
Understanding motor insulation systems
The motor’s insulation system is what makes a motor capable of operating with an inverter power supply. Older motors may experience failure with inverter use. Newer motors that have modern insulation systems designed for inverter compatibility are required. These insulation systems may be configured in many different ways.
Motor manufacturers have long recognized that low-voltage (<600 Vac) 3-phase ac squirrel-cage induction motors that are fed by PWM inverters experience higher dielectric stresses than do equivalent line-fed motors. The fast switching transistors used in modern PWM inverters have helped to produce more sinusoidal currents as well as more efficient and compact inverters. The fast transitions (both turn-on and turn-off) of the transistors helped to enable these improvements but also create higher stresses in the motor insulation. These higher stresses are seen phase to phase, phase to ground, and turn to turn.
The failure mechanism associated with these higher stresses is primarily related to partial discharge (PD) activity. While PD is normally associated with medium-voltage (e.g., 4 kV) motors, in inverter-fed motors it can be created on low-voltage systems as well. This PD (also known as corona inception) damage is a cumulative process, much like fatigue failures on a mechanical component. This is a type of localized emission resulting from transient gaseous ionization in an insulation system when the voltage stress exceeds a critical value.
The corona inception voltage can be tested on a motor with modern equipment. Some manufacturers perform a type test, while others test each motor that has an inverter-ready or inverter-duty insulation system. Such a production test will also identify damaged wire (insulation pin holes or scrapes) that may fail prematurely in operation.
There are two philosophically different approaches to dealing with this sort of stress. One keeps the stresses below a level that causes any damage, while the alternative is to design winding systems to slow down the rate of accumulated damage. NEMA MG 1 states that low-voltage inverter-fed motors should be designed to withstand spikes of 3.1x rated voltage. Manufacturers should test to assure that they can meet or exceed these levels.
Materials are available that degrade much more slowly in the presence of PD activity. Mica-based materials are a common example of what has been used historically in medium-voltage systems. Because PD activity is initiated when there is a high dielectric gradient in the presence of a gas such as air, the common approach to PD avoidance is to reduce dielectric stress gradients and to eliminate air from any regions that may still have a high dielectric gradient.
For low-voltage inverter-fed motors, the manufacturers of magnet wire have produced PD-resistant products. In cases where PD cannot be avoided, these wires can provide longer life. When the motor can be designed to avoid PD activity altogether, such magnet wire provides no incremental benefit.
Motors have been built using PD-resistant wire using the term inverter-spike-resistant wire. After continuous improvements in insulation systems and manufacturing processes, including thousands of partial discharge inception voltage (PDIV) measurements, many motors are now being manufactured as “PD-free.” This allows the attainment of full insulation system life without the use of spike-resistant wire. Such an insulation system has proven itself to be as robust, or even more so, than the use of specialty magnet wire.