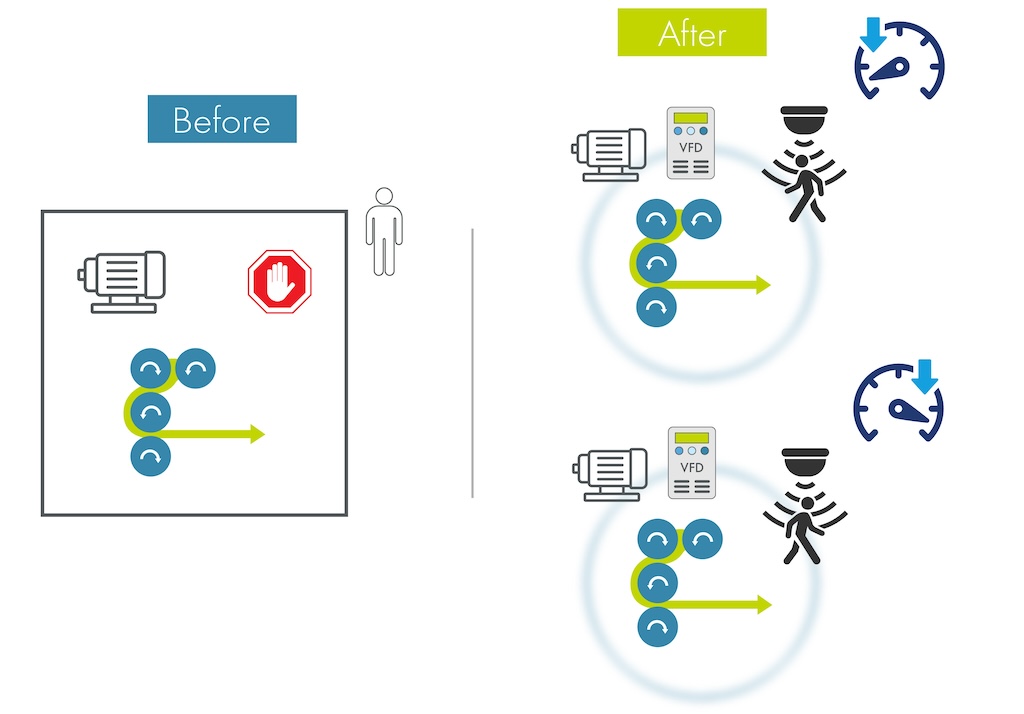
An ac variable speed drive system controls the speed of an ac motor by controlling the frequency of the power supplied to the motor.
An ac variable speed drive system controls the speed of an ac motor by controlling the frequency of the power supplied to the motor. A basic ac drive system consists of an ordinary three-phase motor, a variable frequency drive (VFD) and operator controls.
The motor is usually a standard squirrel cage induction motor rated for 240 or 415 V, 3-phase, 60 (or 50) Hz operation. The variable frequency drive is a solid-state power conversion unit, which typically receives 240 or 415 V, 3-phase, 60 Hz input power, provides power to the motor and can be continuously adjusted from 2 Hz to 60 Hz or higher. The VFD also regulates the output voltage in proportion to the output frequency to provide a nominally constant ratio of voltage to frequency as required by the characteristics of the ac motor.
The operator controls provide a means for starting and stopping the motor and for setting the motor speed. The operator control functions can be performed by the built-in keypad or by a wide variety of automatic control systems.
Motor protection
Motor overload protection must be provided as required by applicable standards. Direct motor protection is not automatically provided as part of the ac drive. VFDs are equipped with electronic protection circuits with an inverse time or I2T characteristic equivalent to a conventional overload relay.
Conventional overload relays are also used with VFDs equipped with bypass. If these current-sensing protective devices are used with motors driving constant torque loads, the minimum speed should be adjusted to prevent the motor from running at speeds at which overheating could occur, unless the I2T circuit provides a speed- and load-calibrated trip. The best means of ac drive motor protection is direct winding overtemperature sensing, such as an overtemperature switch or thermistor embedded in the motor windings.
Overtemperature switches are more convenient because they can normally be connected directly to the ac drive control circuit, while thermistors generally require a special sensing relay. Direct overtemperature protection is preferred over overcurrent sensing protective devices because motor overheating can occur with normal operating current at low operating speeds.
Bearing, dV/dT protection
The high switching frequency present in today’s pulse-width modulated (PWM) drives may cause current to flow in the motor bearings due to shaft voltage caused by capacitive coupling. This current flow can result in minute electrical discharges within the bearing, potentially damaging the bearing over time. Techniques that reduce this effect include:
Use lower voltage motor and control if possible — for example, 240 V instead of 415 V
Run the VFD at the lowest carrier frequency that satisfies any audible noise and temperature requirements
Add a shaft grounding device to the motor. This device has a brush that rides on the motor shaft. Current does not go through the bearing but is instead conducted directly to ground through the brush. These brushes are specially selected to tolerate misalignment and maintain rotating contact throughout the motor’s life
Use a motor with both bearings insulated, which will avoid damage to the motor’s bearings (Caution: Other non-insulated bearings in the mechanical system, which could be connected to the shaft with a conductive coupling such as tachometers or gearboxes may be damaged by the shaft voltage.)
Use non-conductive couplings for the mechanical system, loads or devices, which may be damaged by bearing currents
Ensure that the VFD is grounded according to the manufacturer’s instructions
Use a filter that reduces common-mode voltage. The high switching frequency can also lead to large voltage overshoots at the motor terminals.
Output dV/dT issues
PWM drives use fast semiconductor components known as insulated-gate bipolar transistors (IGBTs) to provide the pulses required to control the voltage and frequency output. The IGBTs turn on and off quickly, which results in a high switching dV/dT. High dV/dT levels — when combined with long cable runs — result in high peak voltage at the motor terminals.
This high peak voltage creates a potential for motor insulation stress and damage due to the peak voltage magnitude or marginal motor insulation — or both. The motor vendor can provide information on the insulation peak voltage and dV/dT capability of its particular motor design. Drive- and motor-mounted filters are available for motors with long cable runs. These consist of peak energy recovery filters, output line reactors and motor terminal reflective wave traps.
Regeneration limit and braking
AC drives inherently develop braking torque when the frequency is reduced to decelerate the motor, or when there is an overhauling load.
When the motor is producing braking torque, it is operating as an induction generator. This means that the motor is receiving (mechanical) power from the load and returning the (electrical) power to the source.
If a drive receives energy regenerated by the motor, the energy appears as a reversal of the dc bus current. Since the standard input converter cannot accept reverse current, the current flows into the dc bus filter capacitors. This charging current causes the dc bus voltage to increase. If this process is allowed to proceed, the ac drive will be damaged by dc bus overvoltage. VFDs must be protected from dc bus overvoltage due to regeneration. The minimum protection is a dc bus overvoltage trip.
If the ac drive is equipped with regeneration limit circuitry, drive control can be maintained during regeneration, and dc overvoltage shutdown can be prevented. If regeneration causes the dc bus voltage to rise during deceleration, the drive will deviate from the programmed deceleration ramp and decelerate at whatever rate is possible without generating excess bus voltage. If an overhauling load causes regeneration, the drive will allow the motor speed to increase above the set speed as required to prevent excess regeneration.
Regeneration limit prevents the motor from developing braking torque above a limit, which corresponds to the normal losses inherent in the motor and controller. When the drive is equipped with dynamic braking, the motor is allowed to develop a higher level of braking torque. The regenerated braking energy is dissipated in the dynamic braking resistors. A fully regenerative drive includes circuitry that returns the regenerated braking energy to the supply (ac) power.
IR compensation
A V/Hz ac drive can provide improved starting torque and low speed overload capability, if the lower speed voltage boost is changed automatically to compensate for changing load conditions. This feature is called IR compensation.
Without IR compensation, it is difficult to achieve the maximum possible motor torque as the voltage boost required for maximum torque can cause the motor to saturate and draw excessive current when it is lightly loaded. The IR compensation circuit senses the motor load and reduces the voltage boost when the motor is lightly loaded. A flux control ac drive provides a similar result by modifying its instantaneous voltage and frequency to allow the motor to develop the required torque for the load.
Noise control
In some installations, it may be necessary to use sound abatement measures to prevent the drive from producing excessive acoustical noise. In a factory environment, noise will probably not be a problem unless the motor is operated above its normal base speed.
In an office environment, the noise may be of greater concern. With PWM drives, the motor produces the majority of the noise. The noise may be noticeable because of the frequencies involved and the sudden shifts in pitch which may occur at certain operating points. The use of carrier frequencies of 6 kHz and above can limit motor noise to levels comparable to direct-on-line operation.
Motor noise can also be reduced by adding a 3% output reactor to the drive. The reactor smooths the output voltage and reduces the components responsible for the motor noise. A third approach for a motor that is not fully loaded is to slightly reduce the VFD’s output voltage. The reduced voltage provides less motor air gap flux, reducing the noise level.
Author Information
Sanjay Kallianpur is product manager, automation and control at Eaton Corp. in Australia. He has more than 20 year experience in the electrical industry in Australia, New Zealand and India. He has a BSEE and a masters in marketing management. Kallianpur has held marketing positions with Schneider Electric, ABB and Eaton Corp. He represents Eaton and the Australian Electrical & Electronics Manufacturers Association (AEEMA) in standards, Australia technical committees and industry forums.
PWM:
Pulse-width modulation is a technique that uses the duty-cycle relationship of a constant amplitude square wave to carry the amplitude of an analog signal. The width of the square-wave pulses is directly proportional to the amplitude of the original modulating analog signal.
dV/dT:
In semiconductor technology, dV/dT is the voltage rise time of a component. Literally, dV/dT means a change in voltage versus change in time.
Overhaul:
Overhauling loads occur when the motor’s load inertia tries to over-speed the motor during deceleration. The flywheel effect of the load turns the motor into a generator, which pushes power back into the drive, causing the dc bus voltage to rise.