Five ways to lower robotic system risks: Industrial safety, while a widely used term, is a misnomer; nothing is without risk. When something is declared safe in an industrial setting, those involved should think again about risk assessment and determine if the risk is acceptable.
What does “robot safety” mean? Human safety around robots is primarily a function of reducing the risks of the robot system as part of the application. It requires thinking about the robot, system (with end effector), and the application (with the workpiece and other elements of the environment).
Many discussions at the International Robot Safety Conference (IRSC) in October were on risk reduction. There are a number of related ISO and ANSI standards on industrial safety of machinery, robotics, risk assessment, and risk reduction. Many of these standards were referenced by IRSC speakers. Whatever standard or guidance one chooses, however, risk assessment remains central to robotic safety. [IRSC, run by the industry and standards organization, Robotic Industries Association (RIA), is part of the Association for Advancing Automation (A3), a CFE Media content partner. This annual conference previously was called the National Robot Safety Conference.]
Robot system risk assessment
Risk assessment is especially important over time, as technologies advance, best practices develop, technical specifications provide guidance, and standards state requirements. Throughout, risk assessments of technologies, designs, applications, and procedures can help lower risk to an acceptable level.
(RIA technical reports and standards in development involve more on robots used collaboratively with humans in industrial operations and industrial mobile robots, among other areas).
Carole Franklin, RIA director of standards development (Figure 1), said some robotic safety standards and documents include:
- ANSI/RIA R15.06-2012 / ISO 10218-1,2:2011 – Safety of Industrial Robots and Robot Systems (being updated including with integrated content from the collaborative robots technical report below)
- RIA TR R15.606-2016 / ISO/TS 15066:2016 – Collaborative Robots (TR is U.S. technical report, and TS is an international technical specification; they’re not required, but provide guidance.)
- Under development: Mobile (R15.08)
- Under development: RIA TR R15.806:2018, which provides guidance on how to test whether or not a collaborative robot system is operating within the force limits delineated in the TS 15066. Other RIA supplemental safety documents include risk assessment, safeguarding, applicability of existing robots and systems, user guidance, pressure and force measurement, and safety validation.
Standards writing requires special skills to create wording general enough to help reduce risk, but not too specific as to be irrelevant for many applications. Because those writing standards cannot foresee all technology combinations and implementations (especially regarding safety), providing risk assessment tools helps those designing, integrating, implementing, and using technologies, robotics, and other motion control technologies to identify and mitigate potential hazards. (Always apply applicable standards.)
Five topics on robot risk reduction from the conference follow.
1. Design safer motion
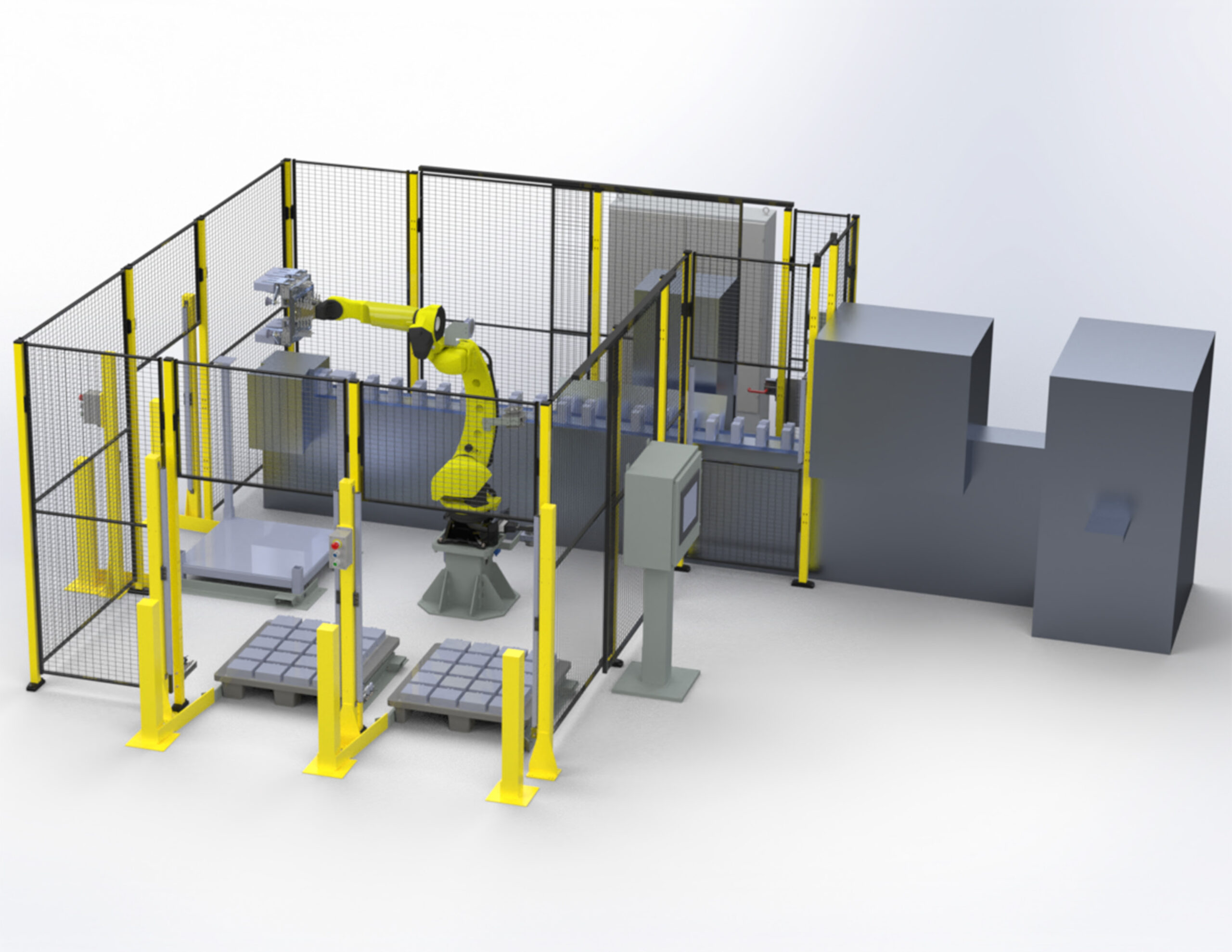
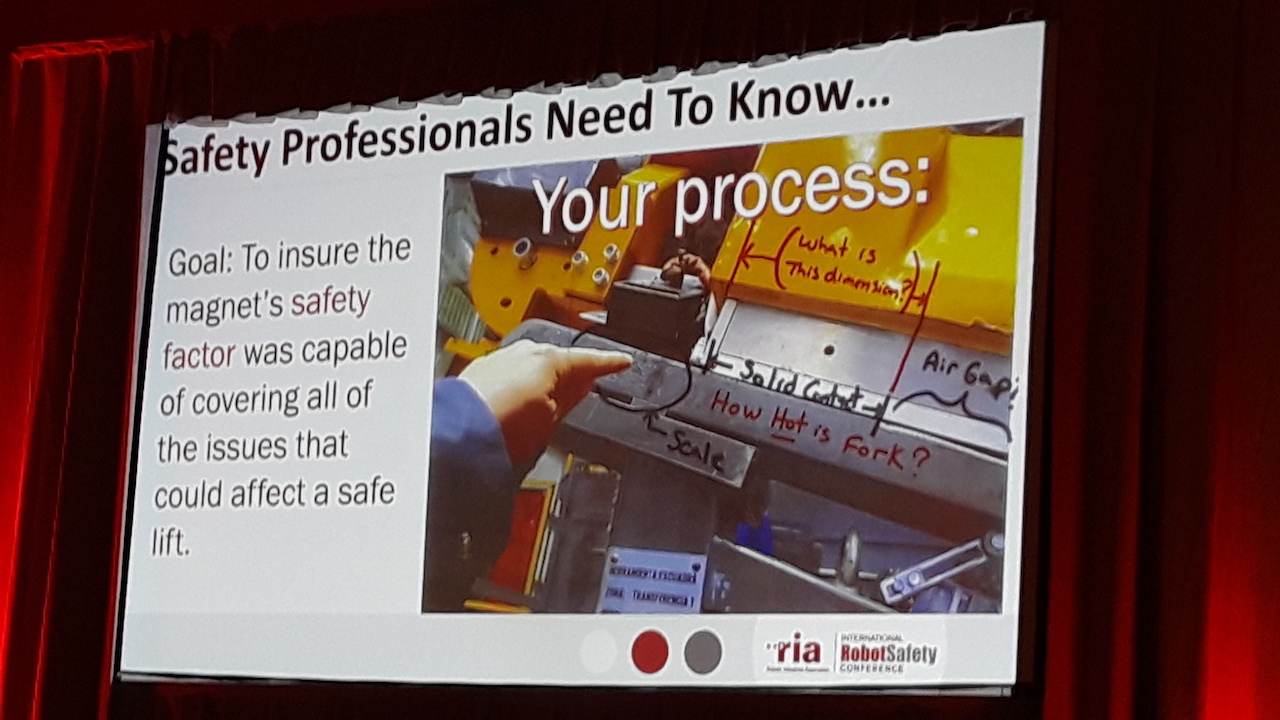
Robotic safety shouldn’t be a reactionary afterthought, said Jeff Pratt, Crown Equipment, senior corporate EHS Engineer (and vice-chair of the RIA R15.08 standard development committee), and César Reyes Núñez, Crown Mexico, EHS coordinator. A Crown risk assessment team works to ensure safety is designed into the process. In examining a workcell (Figure 2) where a robot gripper dropped a large fabricated fork after it came out of an oven, nine outcome branches were identified to ensure that accident wouldn’t happen again. A proximity sensor was applied to the gripper and the robot was reprogrammed to not rotate the fork in a shear (weak) position for the magnet. No fork has been dropped since.
2. When to get help with robots
Craig Salvalaggio, AMT vice president of sales and engineering, Applied Manufacturing Technologies (AMT), co-chair of the RIA Certified Robot Integrator committee, said end users and machine builders have to consider resources when starting a robotic project. Should in-house staff be used for a robot integration project or should an outside integrator be hired? Questions to ask include:
- Do we have robot system expertise in-house?
- Are time and resources available?
- Is application experience available?
- Are those involved up-to-date on the latest safety standards that apply?
If any answers are no, consider a robotic system integrator, Salvalaggio suggested.
3. Know who safety standards address
Standards target different groups and functions; know which address manufacturers, system integration, and users, advised Roberta Nelson Shea (Figure 3), global technical compliance officer for Universal Robots and convener of working group 3 for the update of ISO 10218-1,2. See table.
Table: Who do safety standards address?
| Who | ANSI | ISO and EN | OSHA regulations | EU Machinery Directive |
| Manufacturer | X | X | X | |
| Integrator* | X | X | X | |
| User | X | X | ||
| Could be all | X | Suppliers only |
*A system integration person or firm or others performing system integration
Courtesy: Universal Robots at the International Robot Safety Conference
Terms matter in standards-related documents, to ensure a consistent understanding of requirements and recommendations, explained Nelson Shea (Figures 4, 5, 6).
4. Help for mobile industrial robots
An RIA standard, expected in 2019, will cover R15.08: Industrial Mobile Robot Safety, said Michael Gerstenberger, chair for the R15.08 committee, in part because many available products don’t fit in automated guided vehicle (AGV) categories; they’re mobile robots. The scope covers industrial mobile robots in semi-structured environment with trained personnel (no members of the public), ground-based, on indoor or outdoor applications, on tracks, wheels, and/or legs and with or without a robot arm or a non-actuated attachment.
Figure 5: In standards that originated with RIA, the term “operator(s)” extends beyond production operators, explained Roberta Nelson Shea, global technical compliance officer for Universal Robots and convener of working group 3 for the ISO 10218-1,2 update, at the International Robot Safety Conference. Courtesy: Mark T. Hoske, CFE Media[/caption]
Discussions under consideration include risk, size, and personnel (manufacturers, integrators, and user). Even speed limit is a concern: Is 300 mm/sec too slow (less than 1 mph); people know not to challenge forklifts (which may be allowed to go 10 mph or faster, depending on the application and environment).
5. Beware the end-effectors
A bump from a slow-moving robot arm may not injure, but the end-effector, with a welding tip, gripper, paint tip, grinder, or knife, could cause serious harm regardless of robot design, according to Carolann Quinlan-Smith, CRSP, Workplace Safety and Prevention Services. System integrators must perform a task-based risk assessment for the lifecycle of a robot with its effectors, she said. This includes considering potential contact situations and human interactions.
Courtesy: CFE Media[/caption]
Mark T. Hoske is content manager, Control Engineering, CFE Media, [email protected].
ONLINE extra
Learn more about the IRSC.
A3 also organizes…